//Using RcReceiverSignal v1.1.203
//required to read the receiver's value
//available at http://www.end2endzone.com/rcreceiversignal-an-arduino-library-for-retreiving-the-rc-transmitter-value-from-an-rc-receiver-pulse/
#include <RcReceiverSignal.h>
//Using PinChangeInt version 2402
//RcReceiverSignal library has a dependency to PinChangeInt library.
//available at http://code.google.com/p/arduino-pinchangeint/
#include <PinChangeInt.h>
//Using eRCaGuy_Timer2_Counter version 20140709 (last updated 9 July 2014)
//Required to have a micros() replacement function which has a
//1us resolution instead of 4usec.
//For more information on this library, see the following:
// http://electricrcaircraftguy.com/2014/02/Timer2Counter-more-precise-Arduino-micros-function.html
// http://www.instructables.com/id/How-to-get-an-Arduino-micros-function-with-05us-pr/
#include <eRCaGuy_Timer2_Counter.h>
//project's constants
#define RECEIVER_AUX1_IN_PIN 2 // we could choose any pin
//project's switches
#define ENABLE_SERIAL_OUTPUT
//*****************************************************************************
// TODO: UNCOMMENT ONE OF THE FOLLOWING:
//****************************************************************************/
//#define _4X2POS
//#define _3X2POS1X3POS
//#define _3X3POS
DECLARE_RECEIVER_SIGNAL(receiver_aux1_handler);
inline short clamp(const short & iMin, const short & iValue, const short & iMax) {
if (iValue < iMin)
return iMin;
if (iValue > iMax)
return iMax;
return iValue;
}
void demultiplex4x2Pos(const short & iSignal, bool & oSwitchA, bool & oSwitchB, bool & oSwitchC, bool & oSwitchD) {
#define setSwitches(d,c,b,a) oSwitchA=(a==1); oSwitchB=(b==1); oSwitchC=(c==1); oSwitchD=(d==1);
if ( -150 <= iSignal && iSignal <= -141 ) { setSwitches( 0 , 0 , 0 , 0 ) }
else if ( -140 <= iSignal && iSignal <= -131 ) { setSwitches( 0 , 0 , 0 , 1 ) }
else if ( -130 <= iSignal && iSignal <= -121 ) { setSwitches( 0 , 0 , 1 , 0 ) }
else if ( -120 <= iSignal && iSignal <= -111 ) { setSwitches( 0 , 0 , 1 , 1 ) }
else if ( -110 <= iSignal && iSignal <= -101 ) { setSwitches( 0 , 1 , 0 , 0 ) }
else if ( -100 <= iSignal && iSignal <= -91 ) { setSwitches( 0 , 1 , 0 , 1 ) }
else if ( -90 <= iSignal && iSignal <= -81 ) { setSwitches( 0 , 1 , 1 , 0 ) }
else if ( -80 <= iSignal && iSignal <= -71 ) { setSwitches( 0 , 1 , 1 , 1 ) }
else if ( -70 <= iSignal && iSignal <= -61 ) { setSwitches( 1 , 0 , 0 , 0 ) }
else if ( -60 <= iSignal && iSignal <= -51 ) { setSwitches( 1 , 0 , 0 , 1 ) }
else if ( -50 <= iSignal && iSignal <= -41 ) { setSwitches( 1 , 0 , 1 , 0 ) }
else if ( -40 <= iSignal && iSignal <= -31 ) { setSwitches( 1 , 0 , 1 , 1 ) }
else if ( -30 <= iSignal && iSignal <= -21 ) { setSwitches( 1 , 1 , 0 , 0 ) }
else if ( -20 <= iSignal && iSignal <= -11 ) { setSwitches( 1 , 1 , 0 , 1 ) }
else if ( -10 <= iSignal && iSignal <= -1 ) { setSwitches( 1 , 1 , 1 , 0 ) }
else if ( 0 <= iSignal && iSignal <= 9 ) { setSwitches( 1 , 1 , 1 , 1 ) }
else {
setSwitches(0,0,0,0);
}
#undef setSwitches
}
void demultiplex3x2Pos1x3Pos(const short & iSignal, unsigned char & oSwitchA, bool & oSwitchB, bool & oSwitchC, bool & oSwitchD) {
#define setSwitches(d,c,b,a) oSwitchA=a; oSwitchB=(b==1); oSwitchC=(c==1); oSwitchD=(d==1);
if ( -150 <= iSignal && iSignal <= -141 ) { setSwitches( 0 , 0 , 0 , 0 ) }
else if ( -140 <= iSignal && iSignal <= -131 ) { setSwitches( 0 , 0 , 0 , 1 ) }
else if ( -130 <= iSignal && iSignal <= -121 ) { setSwitches( 0 , 0 , 0 , 2 ) }
else if ( -120 <= iSignal && iSignal <= -111 ) { setSwitches( 0 , 0 , 1 , 0 ) }
else if ( -110 <= iSignal && iSignal <= -101 ) { setSwitches( 0 , 0 , 1 , 1 ) }
else if ( -100 <= iSignal && iSignal <= -91 ) { setSwitches( 0 , 0 , 1 , 2 ) }
else if ( -90 <= iSignal && iSignal <= -81 ) { setSwitches( 0 , 1 , 0 , 0 ) }
else if ( -80 <= iSignal && iSignal <= -71 ) { setSwitches( 0 , 1 , 0 , 1 ) }
else if ( -70 <= iSignal && iSignal <= -61 ) { setSwitches( 0 , 1 , 0 , 2 ) }
else if ( -60 <= iSignal && iSignal <= -51 ) { setSwitches( 0 , 1 , 1 , 0 ) }
else if ( -50 <= iSignal && iSignal <= -41 ) { setSwitches( 0 , 1 , 1 , 1 ) }
else if ( -40 <= iSignal && iSignal <= -31 ) { setSwitches( 0 , 1 , 1 , 2 ) }
else if ( -30 <= iSignal && iSignal <= -21 ) { setSwitches( 1 , 0 , 0 , 0 ) }
else if ( -20 <= iSignal && iSignal <= -11 ) { setSwitches( 1 , 0 , 0 , 1 ) }
else if ( -10 <= iSignal && iSignal <= -1 ) { setSwitches( 1 , 0 , 0 , 2 ) }
else if ( 0 <= iSignal && iSignal <= 9 ) { setSwitches( 1 , 0 , 1 , 0 ) }
else if ( 10 <= iSignal && iSignal <= 19 ) { setSwitches( 1 , 0 , 1 , 1 ) }
else if ( 20 <= iSignal && iSignal <= 29 ) { setSwitches( 1 , 0 , 1 , 2 ) }
else if ( 30 <= iSignal && iSignal <= 39 ) { setSwitches( 1 , 1 , 0 , 0 ) }
else if ( 40 <= iSignal && iSignal <= 49 ) { setSwitches( 1 , 1 , 0 , 1 ) }
else if ( 50 <= iSignal && iSignal <= 59 ) { setSwitches( 1 , 1 , 0 , 2 ) }
else if ( 60 <= iSignal && iSignal <= 69 ) { setSwitches( 1 , 1 , 1 , 0 ) }
else if ( 70 <= iSignal && iSignal <= 79 ) { setSwitches( 1 , 1 , 1 , 1 ) }
else if ( 80 <= iSignal && iSignal <= 89 ) { setSwitches( 1 , 1 , 1 , 2 ) }
else {
setSwitches(0,0,0,0);
}
#undef setSwitches
}
void demultiplex3x3Pos(const short & iSignal, unsigned char & oSwitchA, unsigned char & oSwitchB, unsigned char & oSwitchC) {
#define setSwitches(c,b,a) oSwitchA=a; oSwitchB=b; oSwitchC=c;
if ( -134 <= iSignal && iSignal <= -125 ) { setSwitches( 0 , 0 , 0 ) }
else if ( -124 <= iSignal && iSignal <= -115 ) { setSwitches( 0 , 0 , 1 ) }
else if ( -114 <= iSignal && iSignal <= -105 ) { setSwitches( 0 , 0 , 2 ) }
else if ( -104 <= iSignal && iSignal <= -95 ) { setSwitches( 0 , 1 , 0 ) }
else if ( -94 <= iSignal && iSignal <= -85 ) { setSwitches( 0 , 1 , 1 ) }
else if ( -84 <= iSignal && iSignal <= -75 ) { setSwitches( 0 , 1 , 2 ) }
else if ( -74 <= iSignal && iSignal <= -65 ) { setSwitches( 0 , 2 , 0 ) }
else if ( -64 <= iSignal && iSignal <= -55 ) { setSwitches( 0 , 2 , 1 ) }
else if ( -54 <= iSignal && iSignal <= -45 ) { setSwitches( 0 , 2 , 2 ) }
else if ( -44 <= iSignal && iSignal <= -35 ) { setSwitches( 1 , 0 , 0 ) }
else if ( -34 <= iSignal && iSignal <= -25 ) { setSwitches( 1 , 0 , 1 ) }
else if ( -24 <= iSignal && iSignal <= -15 ) { setSwitches( 1 , 0 , 2 ) }
else if ( -14 <= iSignal && iSignal <= -5 ) { setSwitches( 1 , 1 , 0 ) }
else if ( -4 <= iSignal && iSignal <= 5 ) { setSwitches( 1 , 1 , 1 ) }
else if ( 6 <= iSignal && iSignal <= 15 ) { setSwitches( 1 , 1 , 2 ) }
else if ( 16 <= iSignal && iSignal <= 25 ) { setSwitches( 1 , 2 , 0 ) }
else if ( 26 <= iSignal && iSignal <= 35 ) { setSwitches( 1 , 2 , 1 ) }
else if ( 36 <= iSignal && iSignal <= 45 ) { setSwitches( 1 , 2 , 2 ) }
else if ( 46 <= iSignal && iSignal <= 55 ) { setSwitches( 2 , 0 , 0 ) }
else if ( 56 <= iSignal && iSignal <= 65 ) { setSwitches( 2 , 0 , 1 ) }
else if ( 66 <= iSignal && iSignal <= 75 ) { setSwitches( 2 , 0 , 2 ) }
else if ( 76 <= iSignal && iSignal <= 85 ) { setSwitches( 2 , 1 , 0 ) }
else if ( 86 <= iSignal && iSignal <= 95 ) { setSwitches( 2 , 1 , 1 ) }
else if ( 96 <= iSignal && iSignal <= 105 ) { setSwitches( 2 , 1 , 2 ) }
else if ( 106 <= iSignal && iSignal <= 115 ) { setSwitches( 2 , 2 , 0 ) }
else if ( 116 <= iSignal && iSignal <= 125 ) { setSwitches( 2 , 2 , 1 ) }
else if ( 126 <= iSignal && iSignal <= 135 ) { setSwitches( 2 , 2 , 2 ) }
else {
setSwitches(0,0,0);
}
#undef setSwitches
}
uint32_t timer2GetCountWrapperFunction() {
return timer2.get_count();
}
void setup() {
//configure Timer2
timer2.setup(); //this MUST be done before the other Timer2_Counter functions work; Note: since this messes up PWM outputs on pins 3 & 11, as well as
//interferes with the tone() library (http://arduino.cc/en/reference/tone), you can always revert Timer2 back to normal by calling
//timer2.unsetup()
//configure RcReceiverSignal with an external time counter
//eRCaGuy_Timer2_Counter lirary has 0.5us resolution.
//The counter value must be divided by 2 to convert from 0.5us steps to 1us steps
//which results in microseconds resolution.
RcReceiverSignal::setExternalTimeCounter(&timer2GetCountWrapperFunction, 1, 2);
//link RcReceiverSignal to use PinChangeInt library
RcReceiverSignal::setAttachInterruptFunction(&PCintPort::attachInterrupt);
RcReceiverSignal::setPinStatePointer(&PCintPort::pinState);
#ifdef ENABLE_SERIAL_OUTPUT
Serial.begin(115200);
Serial.println("ready");
#endif
receiver_aux1_handler_setup(RECEIVER_AUX1_IN_PIN);
}
void loop() {
//detect when the receiver AUX1 value has changed
if (receiver_aux1_handler.hasChanged())
{
unsigned long pwmValue = receiver_aux1_handler.getPwmValue();
RcReceiverSignal::VALUE signal = receiver_aux1_handler.getSignalValue(pwmValue);
char buffer[100];
#ifdef _4X2POS
bool switchA = false;
bool switchB = false;
bool switchC = false;
bool switchD = false;
demultiplex4x2Pos(signal, switchA, switchB, switchC, switchD);
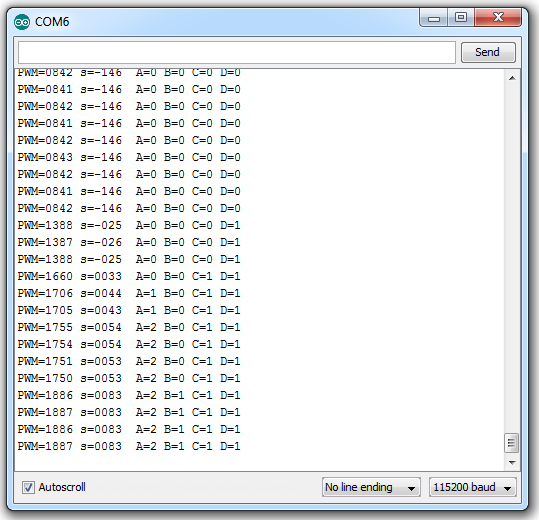
//print switches state
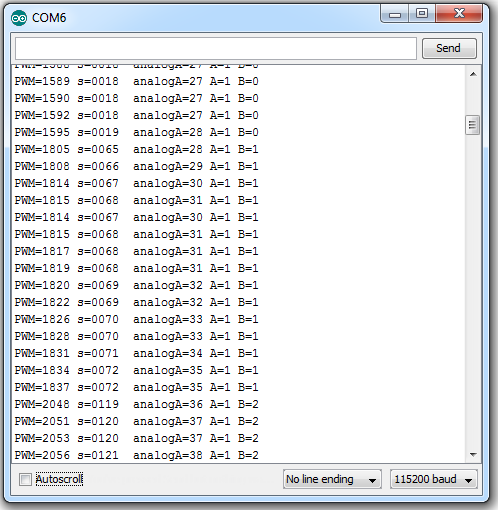
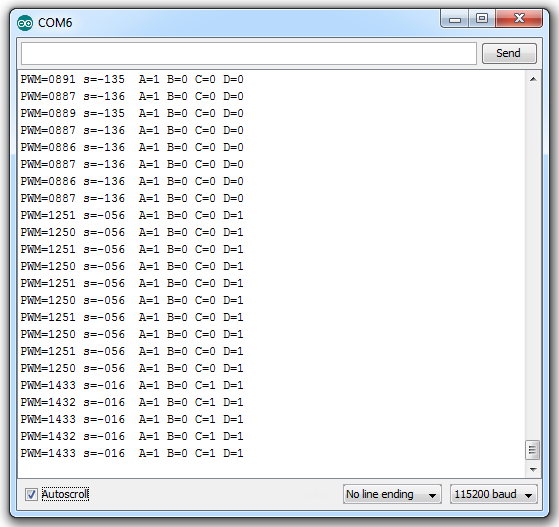
sprintf(buffer, "PWM=%04d s=%04d A=%d B=%d C=%d D=%d",
(int)pwmValue,
(int)signal,
switchA,
switchB,
switchC,
switchD);
#endif
#ifdef _3X2POS1X3POS
unsigned char switchA = 0;
bool switchB = false;
bool switchC = false;
bool switchD = false;
demultiplex3x2Pos1x3Pos(signal, switchA, switchB, switchC, switchD);
//print switches state
sprintf(buffer, "PWM=%04d s=%04d A=%d B=%d C=%d D=%d",
(int)pwmValue,
(int)signal,
switchA,
switchB,
switchC,
switchD);
#endif
#ifdef _3X3POS
unsigned char switchA = 0;
unsigned char switchB = 0;
unsigned char switchC = 0;
demultiplex3x3Pos(signal, switchA, switchB, switchC);
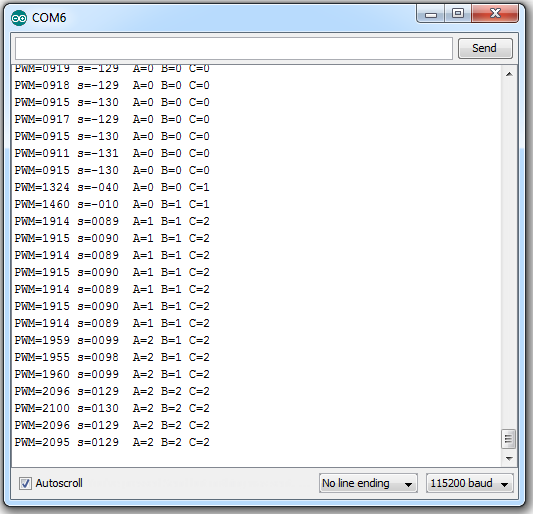
//print switches state
sprintf(buffer, "PWM=%04d s=%04d A=%d B=%d C=%d",
(int)pwmValue,
(int)signal,
switchA,
switchB,
switchC);
#endif
Serial.println(buffer);
}
}
 559x527
559x527
 539x520
539x520
 533x514
533x514
 498x510
498x510